Home » Posts tagged 'slam'
Tag Archives: slam
Paper on RFM-SLAM is Accepted to ICRA 2017
Our paper on a novel technique (RFM-SLAM) for 2D feature based SLAM has been accepted to ICRA 2017 to be held in Singapore!
EDPLab Develops a Novel Technique For Feature-Based SLAM
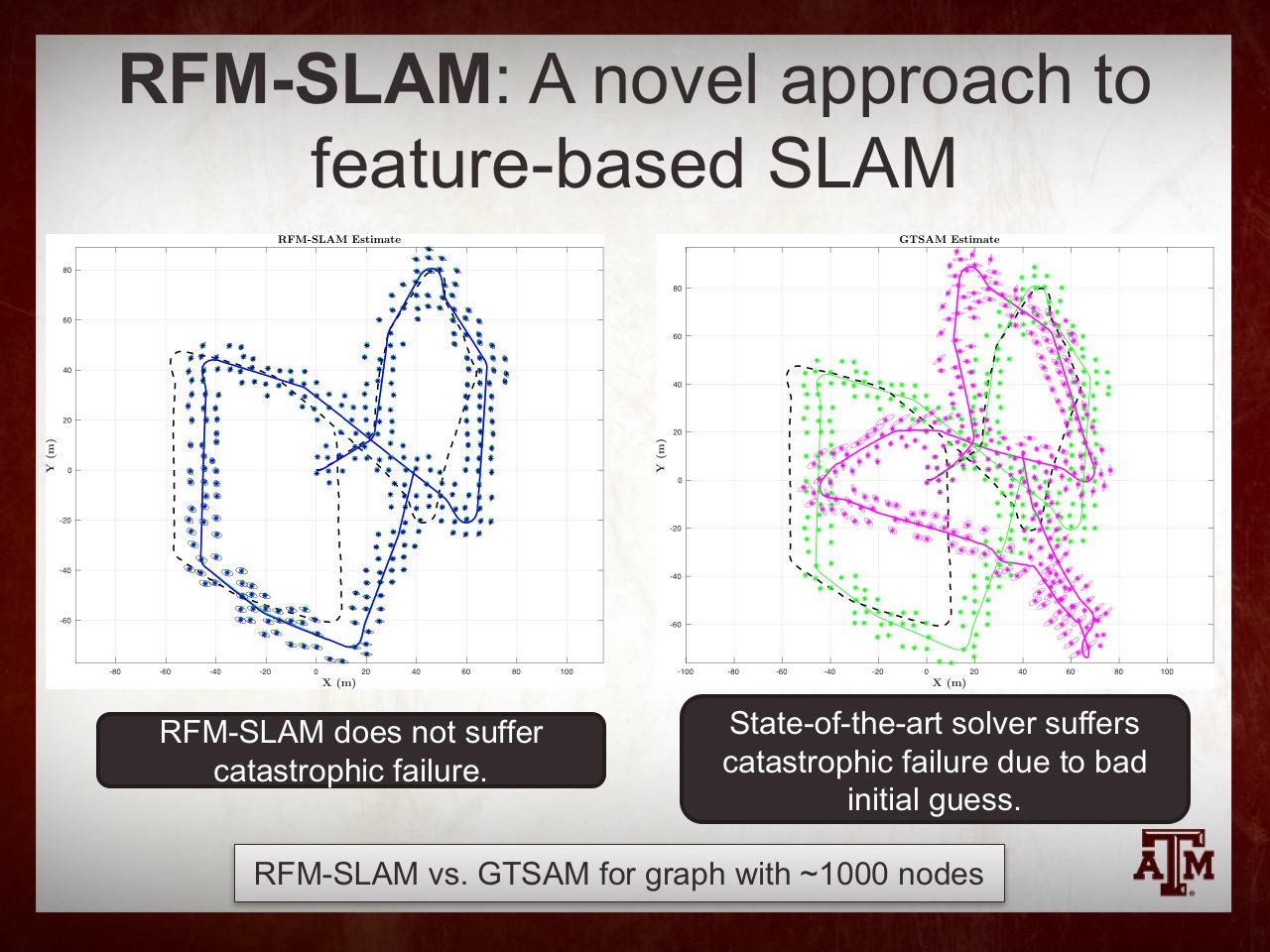
The SLAM problem is known to have a special property that when robot orientation is known, estimating the history of robot poses and feature locations can be posed as a standard linear least squares problem. We have developed a SLAM framework that uses relative feature-to-feature measurements to exploit this structural property of SLAM. Relative feature measurements are used to pose a linear estimation problem for pose-to-pose orientation constraints. This is followed by solving an iterative non-linear on-manifold optimization problem to compute the maximum likelihood estimate for robot orientation given relative rotation constraints. Once the robot orientation is computed, we solve a linear problem for robot position and map estimation. Our approach reduces the computational burden of non-linear optimization by posing a smaller optimization problem as compared to standard graph-based methods for feature-based SLAM. By separating orientation estimation and formulating the robot and landmark position estimation as a linear least squares problem, no initial guess is required for the positions. Further, empirical results show our method avoids catastrophic failures that arise in existing methods due to using odometery as an initial guess for non-linear optimization, while its accuracy degrades gracefully as sensor noise is increased.
[Feel free to study the paper (pdf) submitted for review to ICRA 2017.]