Home » 2014
Yearly Archives: 2014
Feedback-based Information RoadMaps with Open Motion Planning Library
We are pleased to announce that the developers of OMPL (Open Motion Planning Library) at Rice University have posted a guest article by our lab on our latest work on integrating FIRM with OMPL. We would particularly like to acknowledge the support of Mark Moll in this process. Feel free to browse our code on Github and use it in your motion planning research.
Link to Blog: http://ompl.kavrakilab.org/blog
Link to Facebook post: https://www.facebook.com/pages/OMPL/320018418039567
Bringing Belief Space Planning to Physical Systems
Sampling based deterministic motion planning has shown great success in the past. However, as we progress towards more realistic modeling and planning for robotic systems, we need to account for uncertainties in our systems. Uncertainties mainly arise from:
1. Sensing or measurement noise (also called observation noise) i.e. sensors do not give perfect measurements, instead the measurements are corrupted by some noises
2. Motion uncertainty (also called process noise) i.e. the robot’s actuators make some errors in following the control commands
3. Modelling uncertainties i.e. our physical models of the system and environment usually have approximations/errors.
Thus, all these uncertainties call for a new class of motion planners, planners that can reason about the uncertainty in the system and then make smart (optimal) decisions.
In the absence of exact state of the system due to sensing uncertainty, the robot forms a probability distribution over all possible states (referred to as belief) and the planning and decision making has to happen based on the available belief of the system. However, motion planning in the belief space is a challenging problem due to the computational intractability of its exact solution (it can be classified as a Partially Observable Markov Decision Process). This problem becomes even more challenging in changing environments as the robot needs to reason not only about its own state but about external disturbances such as moving people and unforeseen obstacles (furniture, doors etc.).
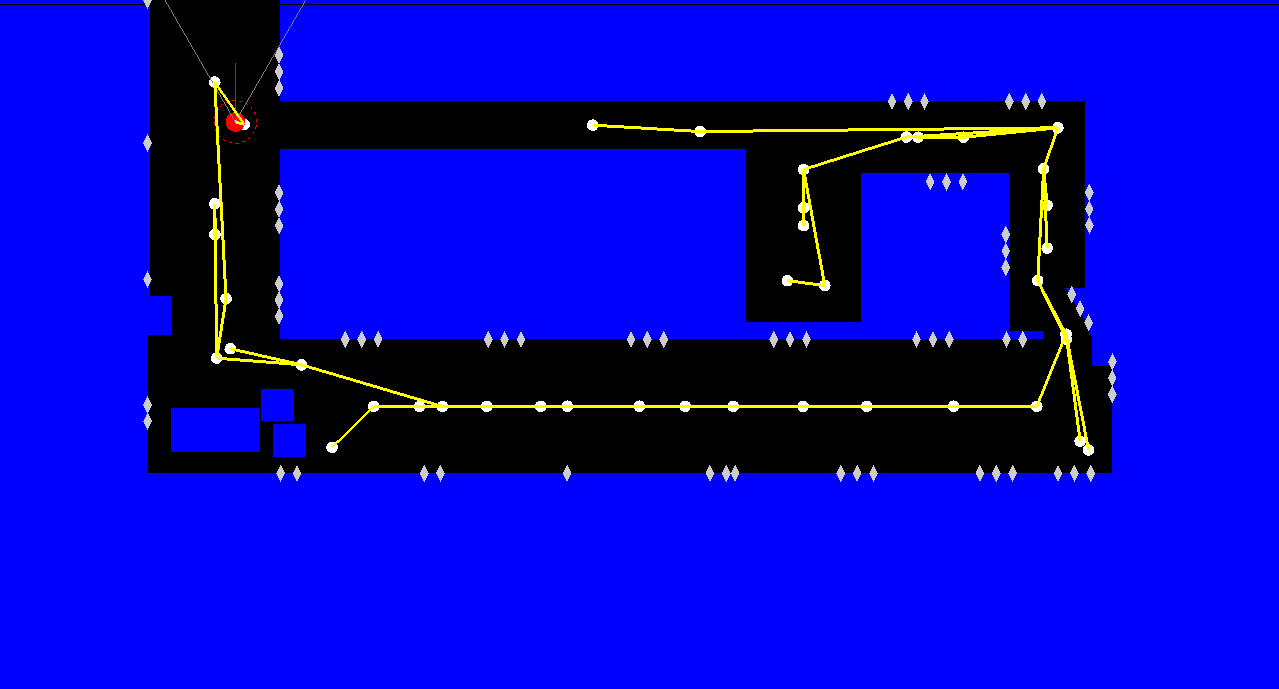
Research conducted at the EDP Lab and Parasol Lab at Texas A&M University and recently joint work with MIT has resulted in an innovative solution called FIRM (Feedback-based Information Roadmaps) that is able to transform the intractable POMDP problem to a graph based structure in belief space. FIRM essentially constructs a roadmap graph in belief space and is able to generate feedback policies and give guarantees on the minimum success probability for a planning task. FIRM generates a policy that is able to guide the robot through paths that minimize the localization uncertainty and collision probabilities. Thus, FIRM provides motion plans that are able to deal with uncertainties in our systems. Further, FIRM is also capable of dynamic replanning in real-time to deal with unforeseen changes in the environment and robot’s state (kidnapping).
We have successfully applied this method in simulation and on real physical robots and demonstrated its robustness in realistic scenarios. Here is a video that shows FIRM running on an IRobot Create that is tasked with visiting multiple goal locations sequentially in an everyday office environment. The goal points are not predefined and submitted by user online. Notice that there are people walking, doors are opened and closed randomly and the robot is kidnapped to unknown locations. Our robot is able to handle all these challenges and accomplish its mission!
Further, we are now linking FIRM with OMPL. You can currently download a working simulation of the FIRM graph construction from github. Please visit the Software page for more information.
ICRA 2014, Hong Kong
Lab member Saurav Agarwal recently presented our group’s work on the application of FIRM to physical mobile robots (video above). FIRM (Feedback-based Information RoadMap) is a method developed by Dr. Ali-akbar Agha-mohammadi that allows for motion planning in belief space. We got to visit the Univ. of Hong Kong and see the ATLAS (Boston Dynamics) live in action!